ROBOTİK CERRAHİ NEDİR?

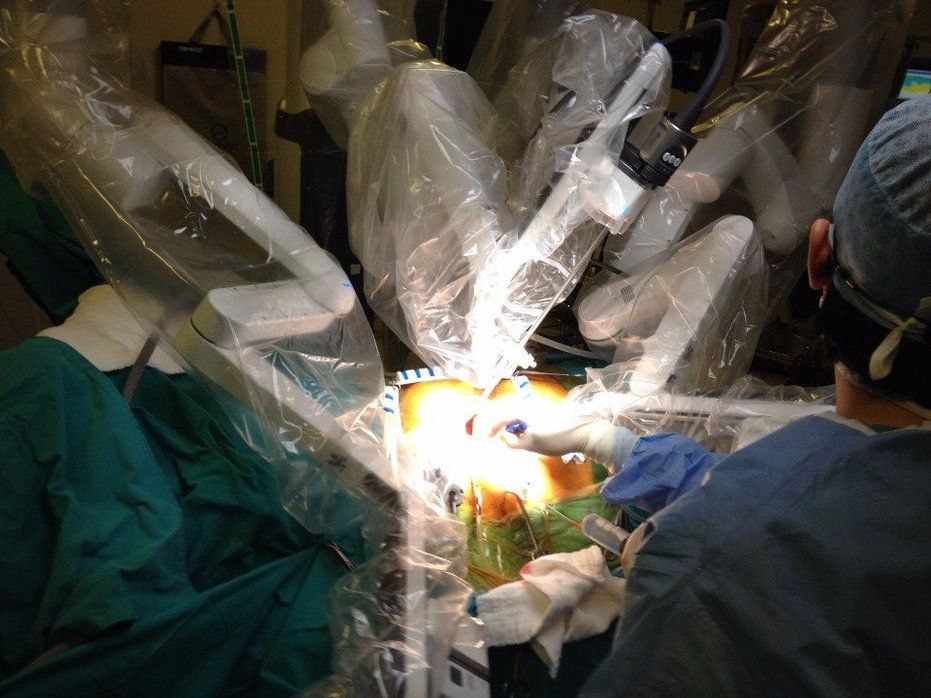
Büyük kesiler ile yaptığımız açık cerrahiler yerine, küçük kesilerden gönderilen 3 boyutlu kamera eşliğinde, cerrahi aletleri taşıyan robot kollarının uzaktan konsol ünitesinden kumanda edilerek cerrahinin gerçekleştirilmesidir.
Robotik cerrahinin tarihçesi
Robotik cerrahi ilk olarak Amerikan Uzay Dairesi (NASA) tarafından 1980’li yılların sonlarında yaralı askerlere uzaktan müdahale etmek için tasarlandı. Daha sonra 1990’lı yılların yıllarda başında kalp cerrahisi başta olmak üzere çeşitli tıp dallarında kullanılmaya başlandı. Hızlı bir başlangıç gösteren kalp cerrahisinde kullanımı azalırken diğer cerrahi branşlardaki kullanımı oldukça artış gösterdi. Son yıllarda yeni teknolojilere bağlı manüplasyon kapatisesi yüksek cihazların kullanıma girmesiyle kalp cerrahisinde kullanılma oranında yeniden artış başladı.
Mayıs 1998'in başlarında Carpentier ve arkadaşları, Paris'te bilgisayar destekli aletler kullanarak ilk açık kalp cerrahisini gerçekleştirdiler. Da Vinci® cerrahi sisteminin (Sezgisel Cerrahi, Sunnyvale, CA) erken prototiplerini, ağırlıklı olarak iki ana özelliği için kullandılar: çalışma alanının kararlı, büyütülmüş, 3D görünümü ve aynı bilgisayar destekli cihazların kullanımı el becerisi ve hareket aralığı.
Bu öncü grup, anevrizma ve atriyal septumun büyük bir kusuru ile başvuran 52 yaşındaki bir kadın üzerinde ameliyat edildi. Operasyon başarılı oldu ve hasta iyileşti. Operasyonun ile ilgili bilgiler detaylı olarak yayınlandı.
Aynı grup 1998 yılında beş bilgisayar destekli prosedür daha gerçekleştirdi (mitral kapak tamiri) ve sürekli olarak mükemmel sonuçlar verdi. Bu prosedürler 5 cm'lik insizyonlarla (dördüncü interkostal boşluk) gerçekleştirildi. Ameliyat süresi geleneksel açık tekniklere göre ortalama% 30-60 daha uzundu. Ortalama olarak, prosedürün% 60 ila% 75'i robotik olarak desteklendi.
Mayıs 1998'de, Leipzig’de Mohr ve Falk, toplam endoskopik prosedürlere yakın olarak robotik destekli ek mitral kapak operasyonları gerçekleştirdi. Aynı Leipzig grubu açık bir insizyonla da olsa ilk robotik koroner anastomozu gerçekleştirdi. Haziran 1998'de ilk tamamen endoskopik robot destekli koroner arter bypass grefti (CABG) Paris'teki Carpentier ekibi tarafından yapıldı. İki hastaya başarılı bir şekilde tamamen endoskopik sol internal torasik arter çıkarılması ve sol ön inen artere anastomozu uygulandı. Aynı zamanda, Münih'te, Reichenspurner ve arkadaşları, ses kontrollü ve bilgisayar destekli ZEUS Robotik Cerrahi Sisteminin (Computer Motion, Goleta, CA) ilk klinik kullanımını başlattı. İki hastada tamamen endoskopik ses kontrollü robot yardımlı koroner bypass’ı başarıyla tamamladılar. Falk ve arkadaşları mitral kapak onarımı yapılan sekiz hastada ses kontrollü bir robot kol kullandı. Benzer şekilde mükemmel sonuçlar verdiler.
Bu erken deneyimlerin ardından, Nifong ve ark., Robotik mitral kapak onarımının güvenliğini ve etkinliğini araştırmak için bir ABD Gıda ve İlaç İdaresi (FDA) denemesi gerçekleştirdi. Da Vinci cerrahi sistemi kullanılarak mitral kapak onarımı uygulanan 38 hastadan oluşan bir grup çalışıldı. Çalışmada mortalite veya anlamlı morbidite bildirilmemiştir. Çalışmanın ikinci yarısında kardiyopulmoner bypass (CPB) ve aortik klemp sürelerindeki azalma teknikle ilerleyen bir öğrenme eğrisi göstermiştir. Aynı grup, Da Vinci bilgisayarlı telemanipülasyon sistemini kullanarak mitral kapak tamiri güvenliği konusunda çok merkezli bir denemeyi tamamladı. Toplam 112 hastaya medyan sternotomiye dönüşüm yapılmadan, 30 günlük mortalite olmadan ameliyat yapıldı. Hastaların 5 yıllık reoprasyon gerektirmeme oranı % 90 saptandı. Londra'daki St Mary's Hastanesi'nde İngiltere'de atan kalpte robotik destekli minimal invaziv koroner bypass (MIDCAB) veya tamamen endoskopik koroner bypass (TECAB) yapılan ilk 100 hastanın orta dönem sonuçları bildirdi. İngiltere'de sadece da Vinci robotik klinik serisi veya robotik kalp cerrahisinin sonuçlarını analiz eden randomize kontrollü çalışmalar veya uzun süreli veri bulunmamaktadır.
Robot hangi ünitelerden oluşmaktadır?
Kullanmakta olduğumuz robotik sistemin adı Da Vinci® olup, uzaktan manüplasyon konsolu, kolların bağlı olduğu robotik ünite ve 3 boyutlu görüntü sağlayan optik sistemden oluşmaktadır.
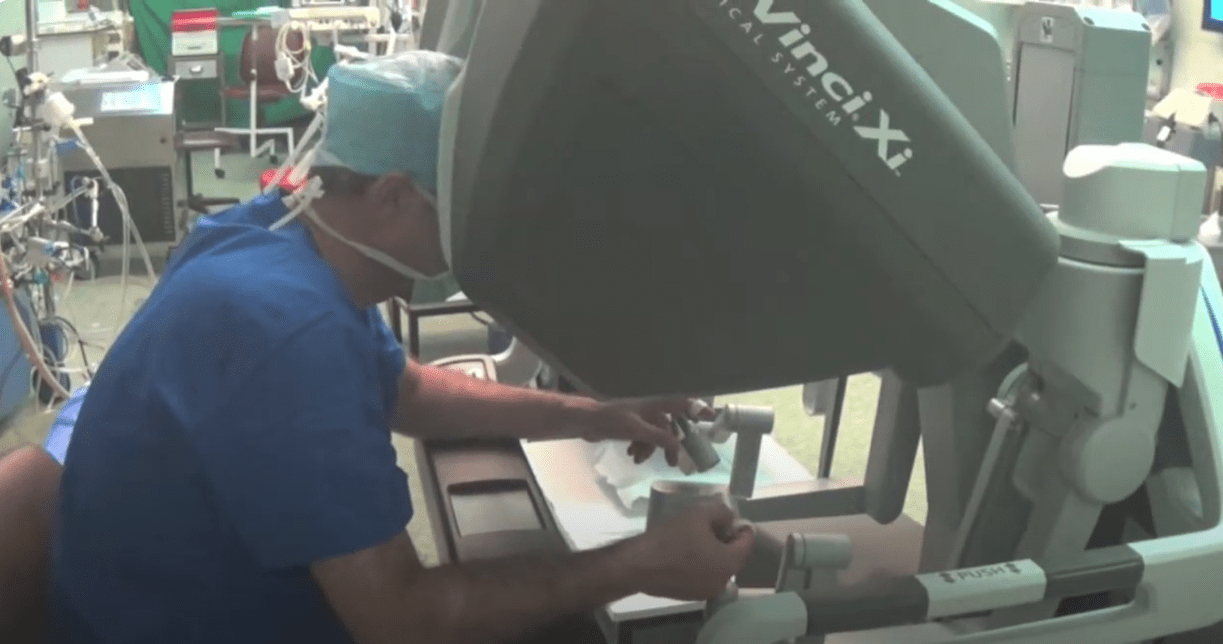
Resim: Akdeniz üniversitesinde kullandığımız Da VinciXi robotik sistem
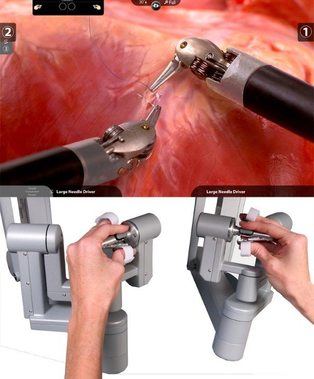
Resim 1. Cerrahi konsoldan manüplasyon
Robotik konsolda operasyonu gerçekleştiren cerrah operayon alanını 10-12 misli büyütülmüş ve 3 boyutlu olarak görür. Bu da operasyon esnasında derinlik hisis sağlamakta ve ayrıca en küçük detaylar dahi gözden kaçmamaktadır.
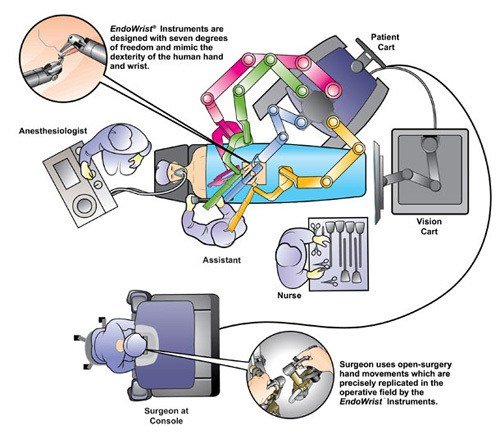
Resim 2. Robotik kalp cerrahisi ekibi
Robotik kalp cerrahisinin diğer endoskopik cerrahilerden farkı nedir?
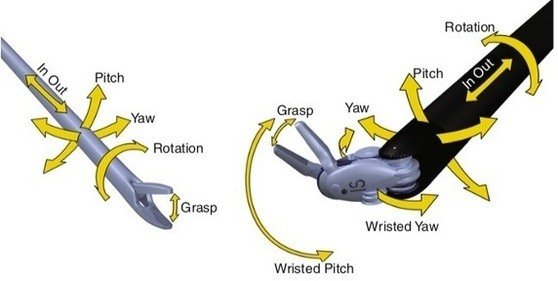
Minimal invaziv kalp cerrahisinde nihai amaç, göğsün bütünlüğünden ödün vermeden ameliyat yapmaktır. Kalbe endoskopik erişim, ameliyat travmasını azaltır. Bununla birlikte, cerrahi yaklaşımı önemli ölçüde karmaşıklaştırır, ancak daha yüksek hassasiyet, el becerisi ve sezgisel uzaktan kullanım ile daha sofistike enstrümanlar gerektirir. Standart endoskopik enstrümanlar sadece dört eksende hareket serbestliğine sahipken, 3 boyutlu robotlar ilave iki olmak üzere altı serbest hareket eksenine sahiptir. Sabit bir giriş noktası (port) kullanarak, operatör dayanak etkisi nedeniyle "geri hareketi" yapması sağlanır.
Hareket iletimi ayrıca doğrudan doğru olmayan ölçeklendirmeye yol açabilecek iç ve dış alet mili uzunluğu oranına da bağlıdır. Alet şaftındaki kesme kuvvetlerini dengelemek için daha yüksek taşıma kuvvetleri gereklidir, bu da operatörde hızlandırılmış kas yorgunluğuna ve temel olarak doğrusal olmayan bir kuvvet ilişkisine yol açar. Endoskopik cerrahi sırasında, neredeyse kaçınılmaz olarak kamera görüş açısının ve cihazın yönünün yanlış hizalanması söz konusudur. Bu görsel-motor uyumsuzluğu yaratır ve operatörün bilişsel ve motor becerilerini önemli ölçüde bozar.
Robotik cerrahi özel eğitim gerektirir mi?
Robotik cerrahi için mutlaka eğitim ve sertifika alınması gerekmektedir. Sertifikası olmayan kimselerin robotu kullanması mümkün değildir. Sertifika almak için öncelikle robotun genel teknik özelliklerinin bilinmesi, simülasyon ünitesinde el becerilerinin geliştirilmesi, kadavrada uygulama, vaka izleme ve hastada uygulamayı kapsamaktadır.
Robotik cerrahi hem teknik açıdan zorlayıcı hem de kavramsal olarak geleneksel açık tekniklerden farklıdır. Sternotomiden port erişim cerrahisine geçiş, tamamen yeni bir beceri setinin benimsenmesini ve teknolojiye aşina olmayı gerektirir. Kuruluşundan bu yana, kalp cerrahisinde robotik tekniklerin yavaş bir şekilde benimsenmesi olmuştur. Bunun dört ana faktörle ilişkili olduğu varsayılabilir: maliyet; önemli kurumsal kaynak ve altyapı ihtiyacı; teknik talepler; en önemlisi, eğitim eksikliği. Şu anda robotik kalp cerrahisinde tanınmış resmi eğitim programları bulunmamaktadır. Sonuç olarak, bir robotik programının başlangıcında mentorluk ve proktor eksikliği gibi önemli unsurlar vardır.